I am a first-year PhD student at Stanford University. I am passionate about computer graphics and vision research, currently with a specific focus on 3D generation, reconstruction, and neural rendering. Previously, I worked on image-based 6DoF pose estimation.
I obtained my master’s and bachelor’s degree in Automotive Engineering in Tongji University. I have interned at SU Lab (working with Prof. Hao Su) and Alibaba DAMO Academy (working with Dr. Pichao Wang). During my undergrad I worked on Formula SAE engineering as a racing enthusiast.
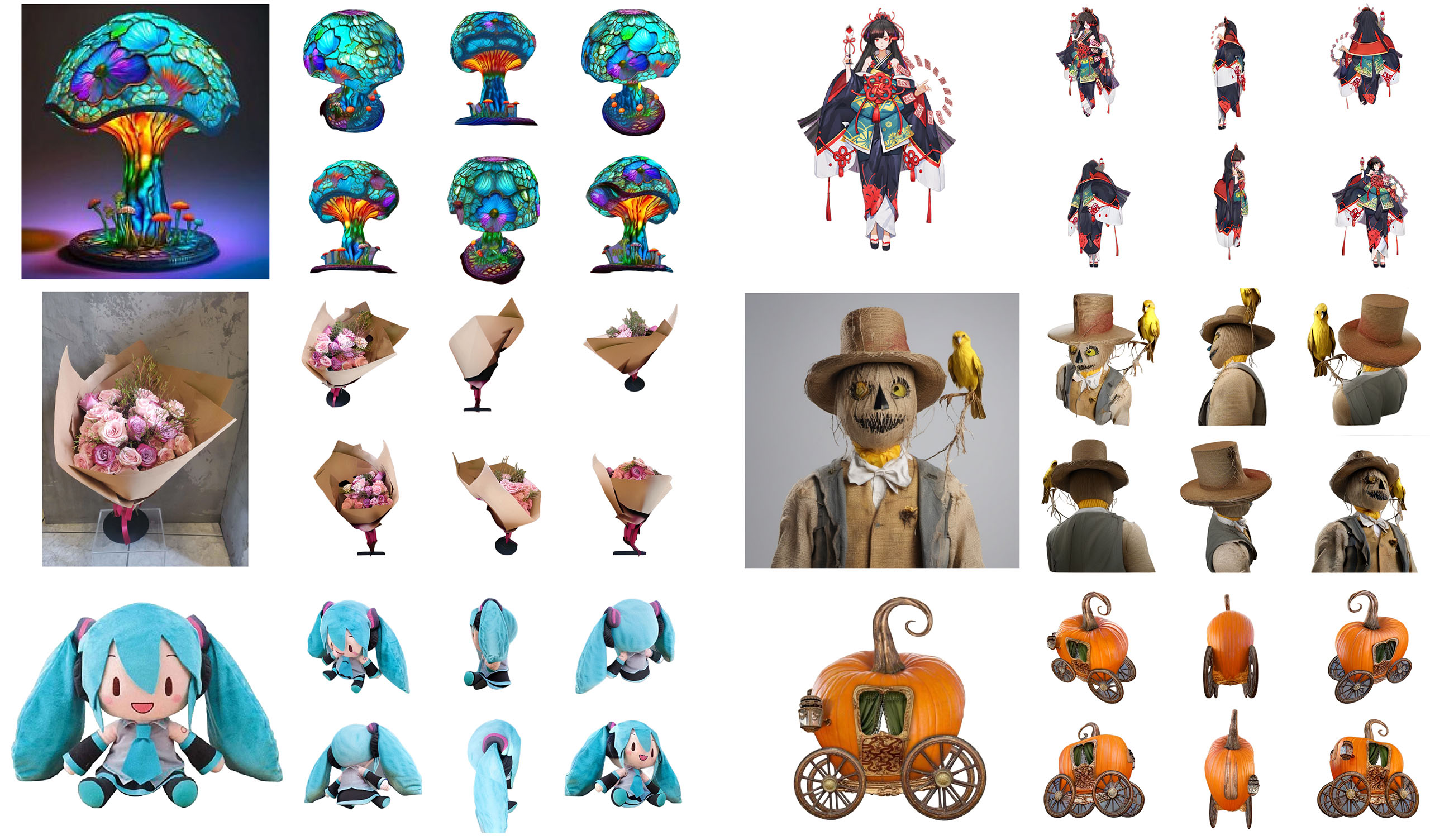
Combining multiview diffusion and multiview-conditioned 3D diffusion models, One-2-3-45++ is capable of transforming a single RGB image of any object into a high-fidelity textured mesh in under one minute.
Zero123++ transforms a single RGB image of any object into high-quality multiview images with superior 3D consistency, serving as a strong base model for image-to-3D generative tasks.
With 3D diffusion models and NeRFs trained in a single stage,
SSDNeRF learns powerful 3D generative prior from multi-view images, which can be exploited
for unconditional generation and image-based 3D reconstruction.
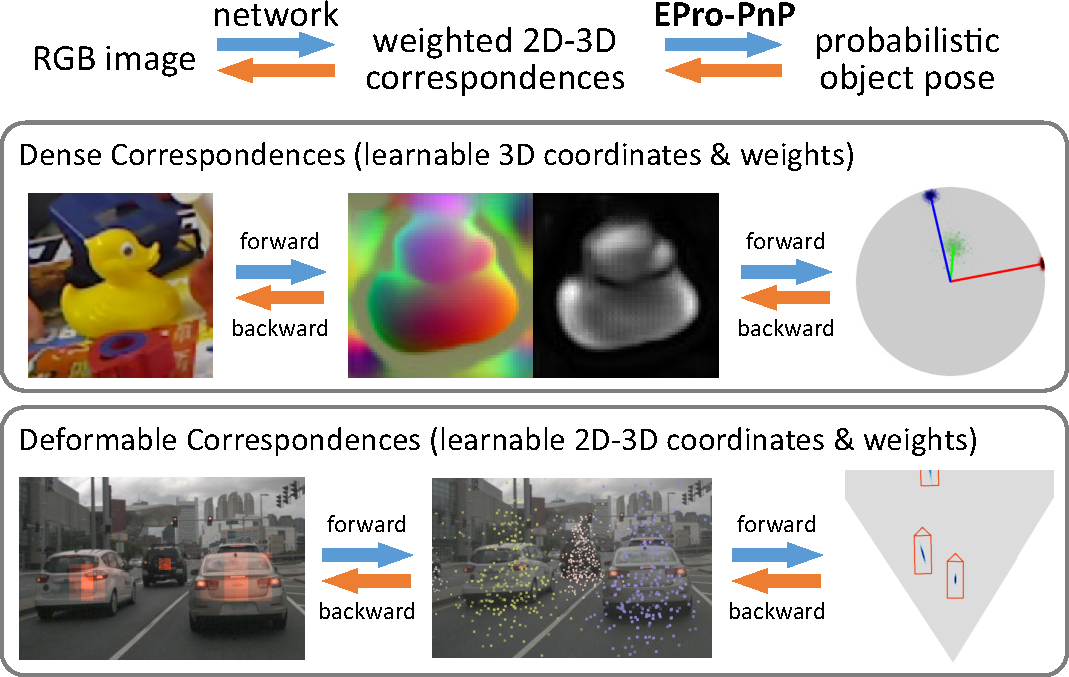
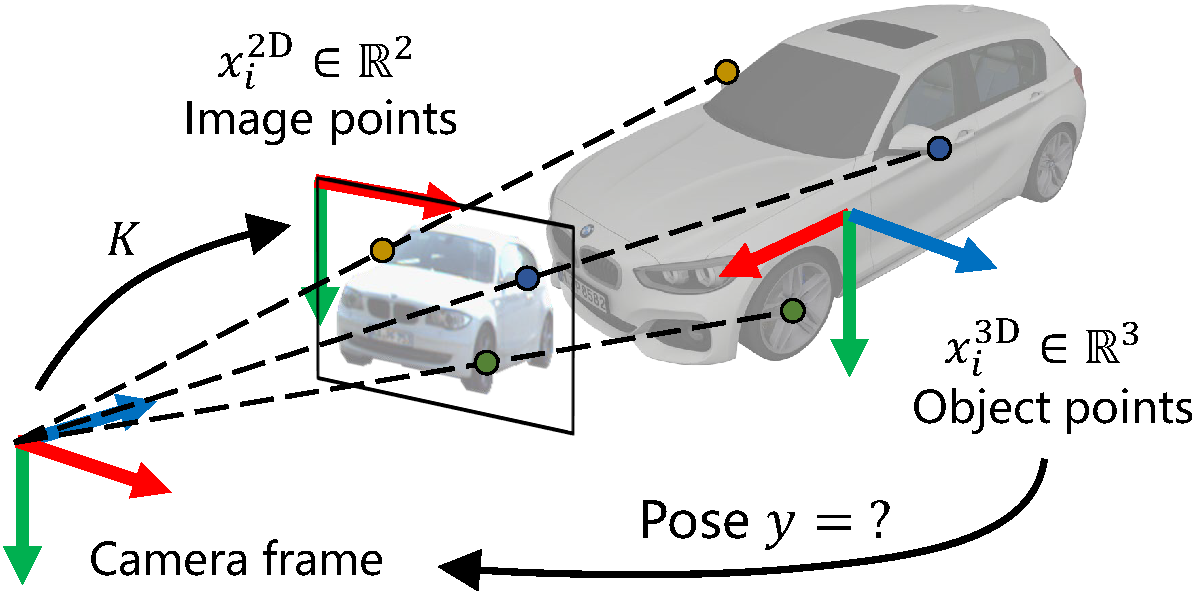
EPro-PnP: Generalized End-to-End Probabilistic Perspective-n-Points for Monocular Object Pose Estimation
Hansheng Chen, Pichao Wang, Fan Wang, Wei Tian, Lu Xiong, Hao Li
CVPR, 2022 (Best Student Paper)
We present a probabilistic PnP layer for end-to-end 6DoF pose learning. The
layer outputs the pose distribution with differentiable probability density, so
that the 2D-3D correspondences can be learned flexibly by backpropagating the pose loss.
EPro-PnP: Generalized End-to-End Probabilistic Perspective-n-Points for Monocular Object Pose Estimation
Hansheng Chen, Wei Tian, Pichao Wang, Fan Wang, Lu Xiong, Hao Li
TPAMI, 2024
The updated paper features improved models with better results on both the LineMOD and nuScenes benchmark.
Morever, we have added more discussions on the loss functions, which are supported by rigorous ablation studies.
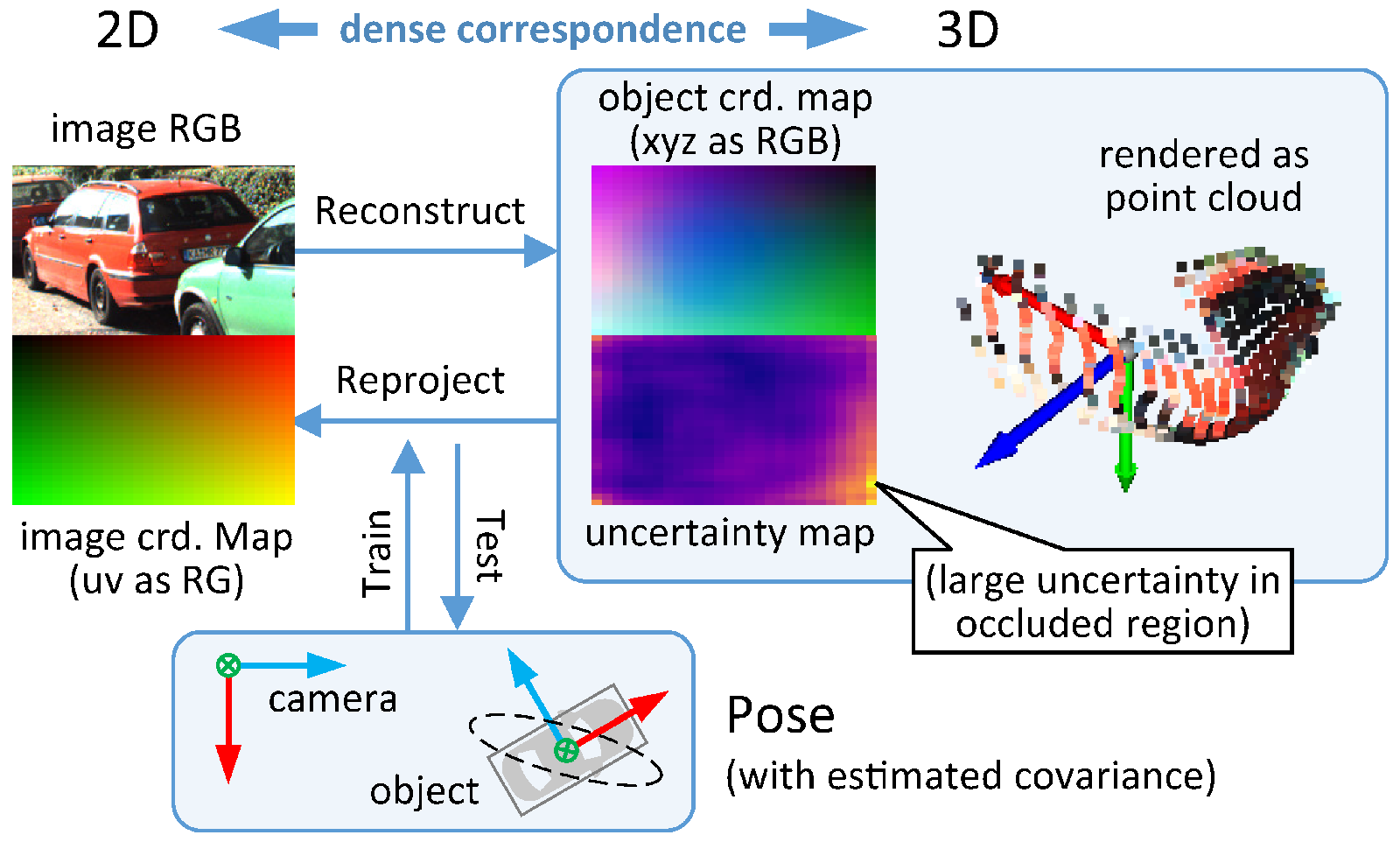
We present a novel 3D object detection framework based on dense 2D-3D correspondences. An uncertainty-aware
reprojection loss is proposed to learn the 3D coordinates without prior knowledge of the object geometry.
A real time parking slot detection model that runs 30 FPS on a 2.3 GHz CPU core, yielding corner localization error of 1.51±2.14 cm (std. err.) and slot detection accuracy of 98%.